A Multi-Robot Simulation Framework for Cooperative Construction
Work in Progress
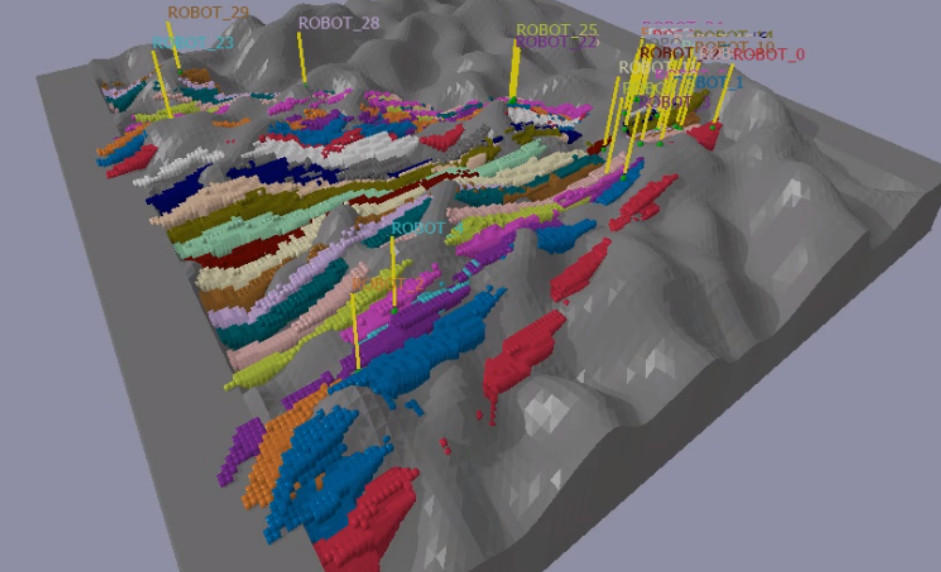
A 3D simulation framework to evaluate and demonstrate the effectiveness of MARS in large environments (terrain size, robots and depositions), and to design and evaluate multi-robot coordination algorithms for collective construction.
Project Showcase
Each building agent is a self-contained robot capable of sensing and modifying its environment. Currently, the material deposition is abstracted; each agent deposits a construction "block" with a specific color. The simulator has been tested with 60 individual robots operating simultaneously on a large terrain.
Evaluating Optimum Perception Range
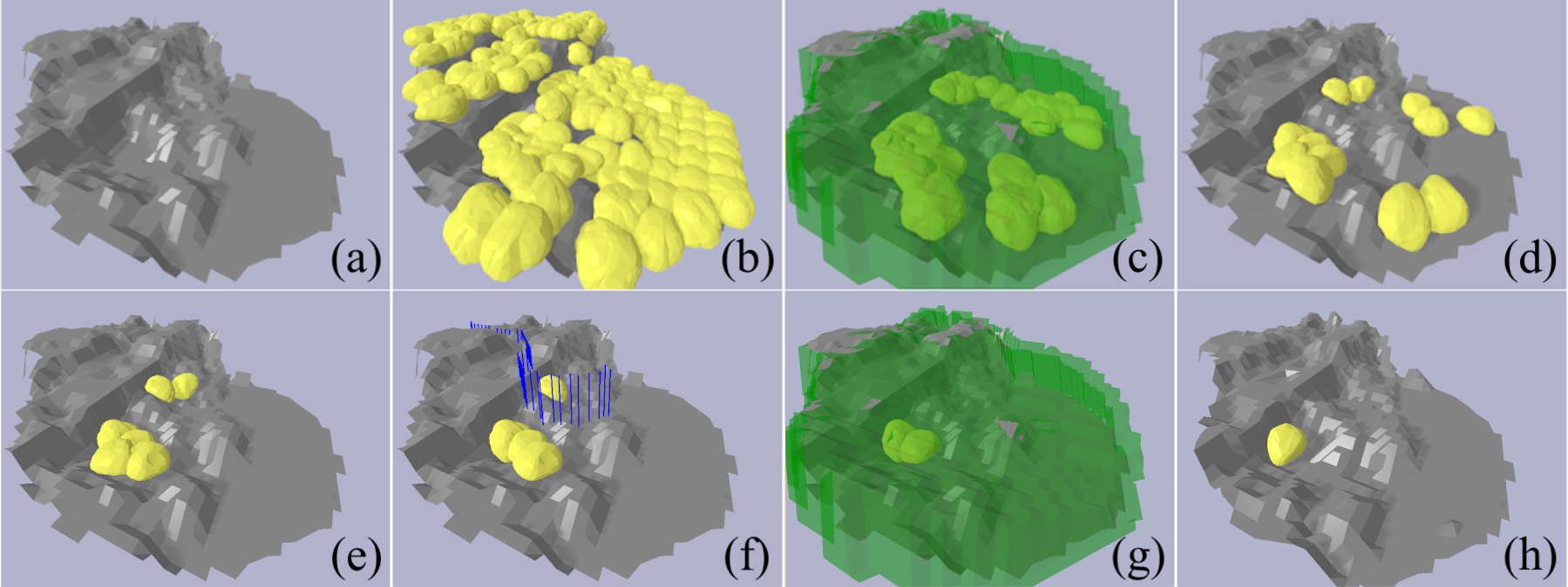
Two robots with different perceptual ranges (depicted as purple blocks) are required to reach the top platform over a large ridge independently.
Coordination through Stigmergy
Three identical robots are required to reach a target location on the right platform over a large irregular terrain. They are allowed to modify the environment in a round-robin fashion.
Deposition Planning
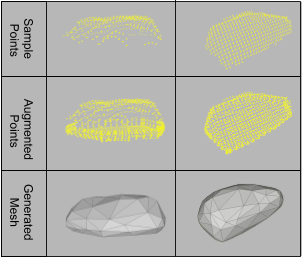
We also utilize a simulator to plan deposition poses for rigid objects in unstructured environments. The deposition planner utilizes simulations to incorporate the uncertainties in the world description and in the robot dynamics. A physics-based simulator is used for finding an initial set of physically stable poses which is refined through an action space reduction method. For more information, click here.
An
approximate close stone mesh
is generated using the noisy and incomplete data from the scanning sensor.
Dry Stacking Wall Simulator
A 2D simulation framework to test dry stacking assembly methods.
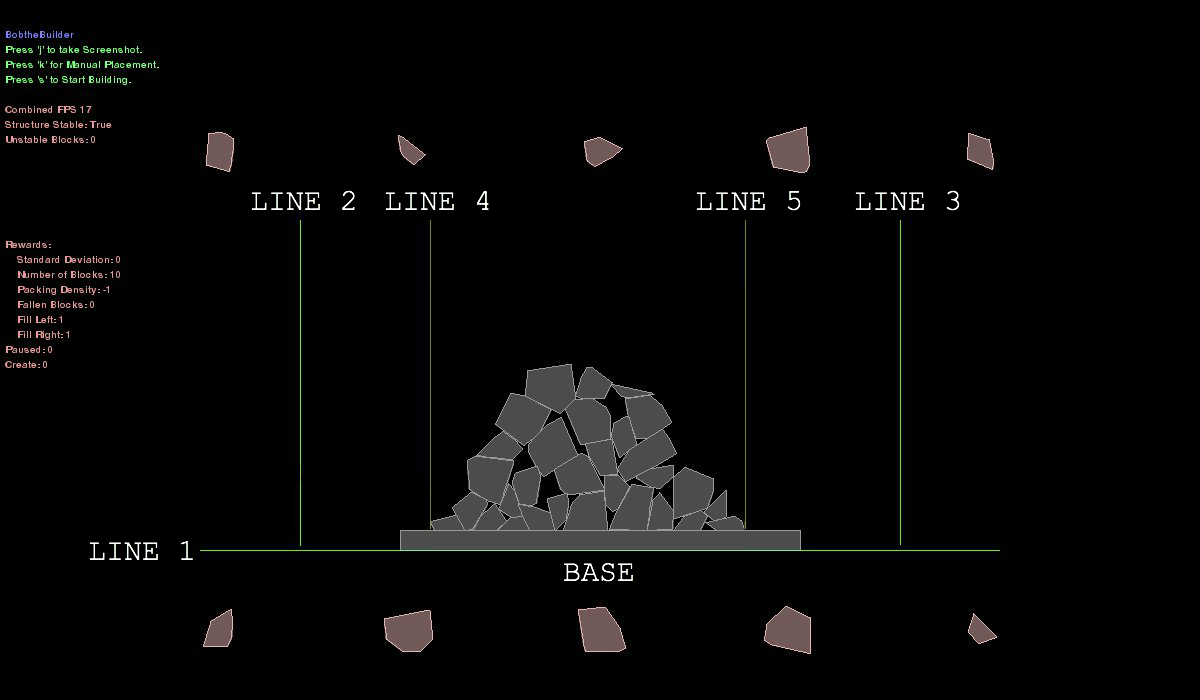
Shake Table
The target structure is built on a simulated shake table, and after a particular construction experiment is complete, the whole structure is shaken and displacements of the objects are observed.
Feasible Action Space
The physics simulator provides a set of stable object poses on a partially built structure. An intial pose from the set of discretized poses is selected. The object is then simulated forward until it reaches a physically stable poses.