Design and Simulation of a Multi-Robot Architecture for Large-scale Construction Projects
[ Watch Movie ]
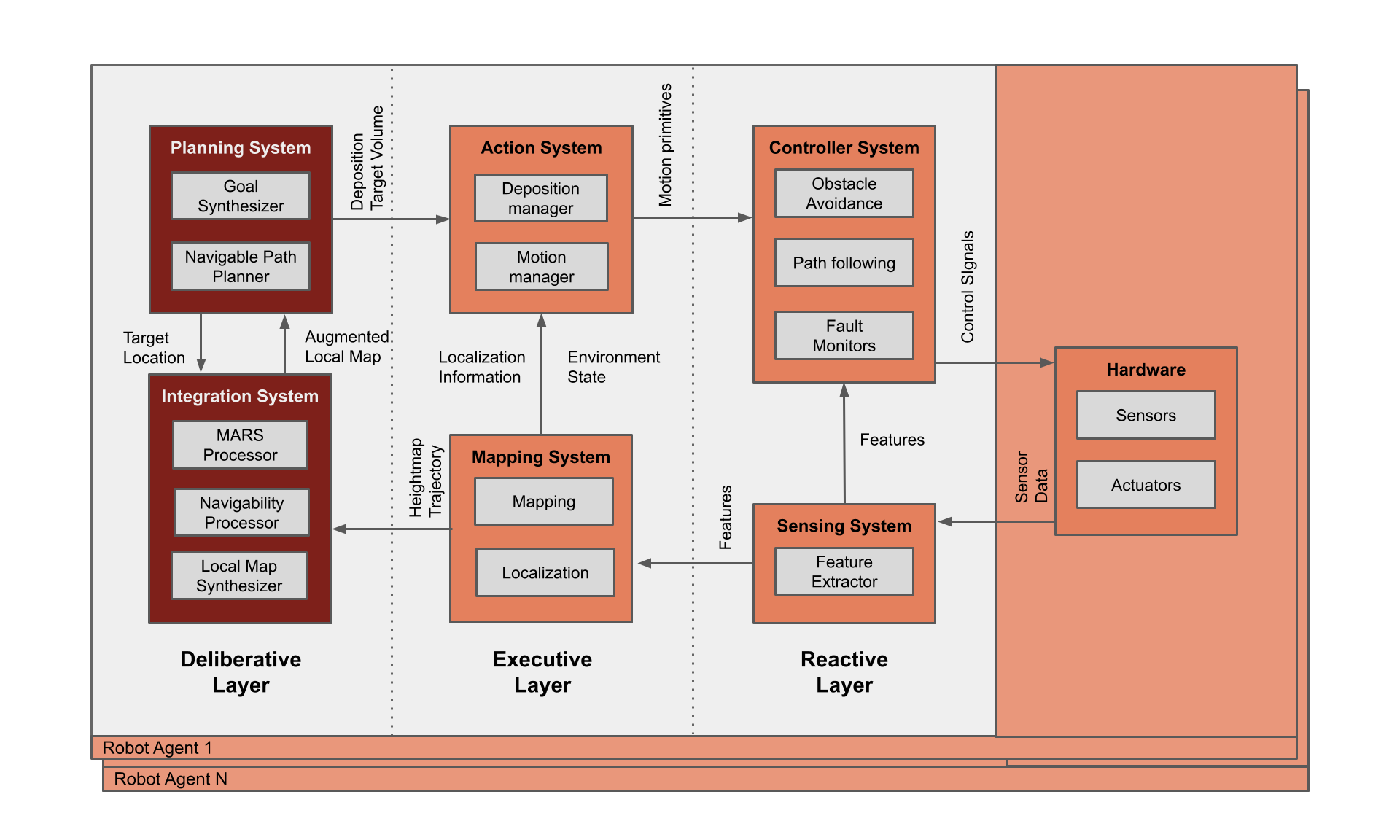
A flexible system architecture, MARSala, that allows fora team of mobile robots to construct motion support structures in large and unstructured environments using local interactions. The proposed architecture provides a means for formulating a construction project as a motion support structure construction problem.
The
Minimal Additive Ramp Structure
is computed based on local views.
Navigable Path Planning
The augmented local map is used by the
Navigable Path Planner
to compose a plan to build a navigable path from the local origin to the local goal.
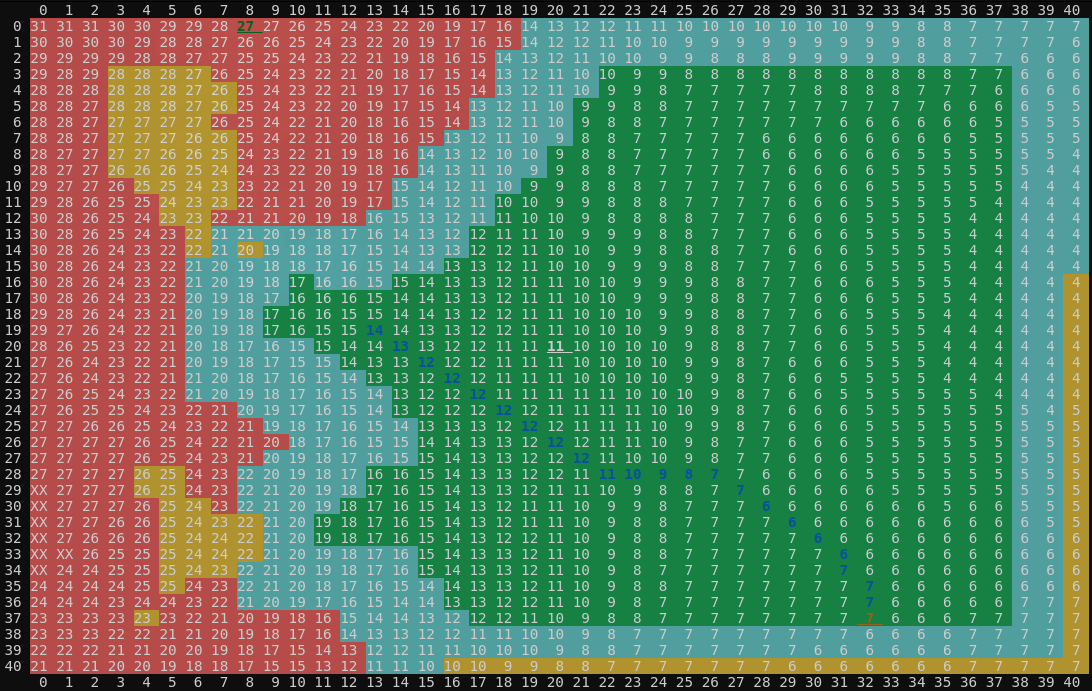
The augmented local map consists of the local heightmap, navigability map, local goal, local origin and MARS gap map. The cells with green, yellow, blue and red background colors depict navigable, occupiable, reachable and un-occupiable positions. The cells with green and red foreground colors (and underlined) depict the local start and local goal positions.
The
Local Map Synthesis
provides consistency for the local construction planner in the Global deposition bounds, Target location and Return path. This allows for a decentralized coordination between robots as the actions taken locally are consistent across robots since they depend only on the target location and the local environment.
Scenario A: Collectively building a navigable path
In this scenario, a large, mobile payload system with conservative motion
parameters is to be transported to an inaccessible target location in a large unstructured
environment.
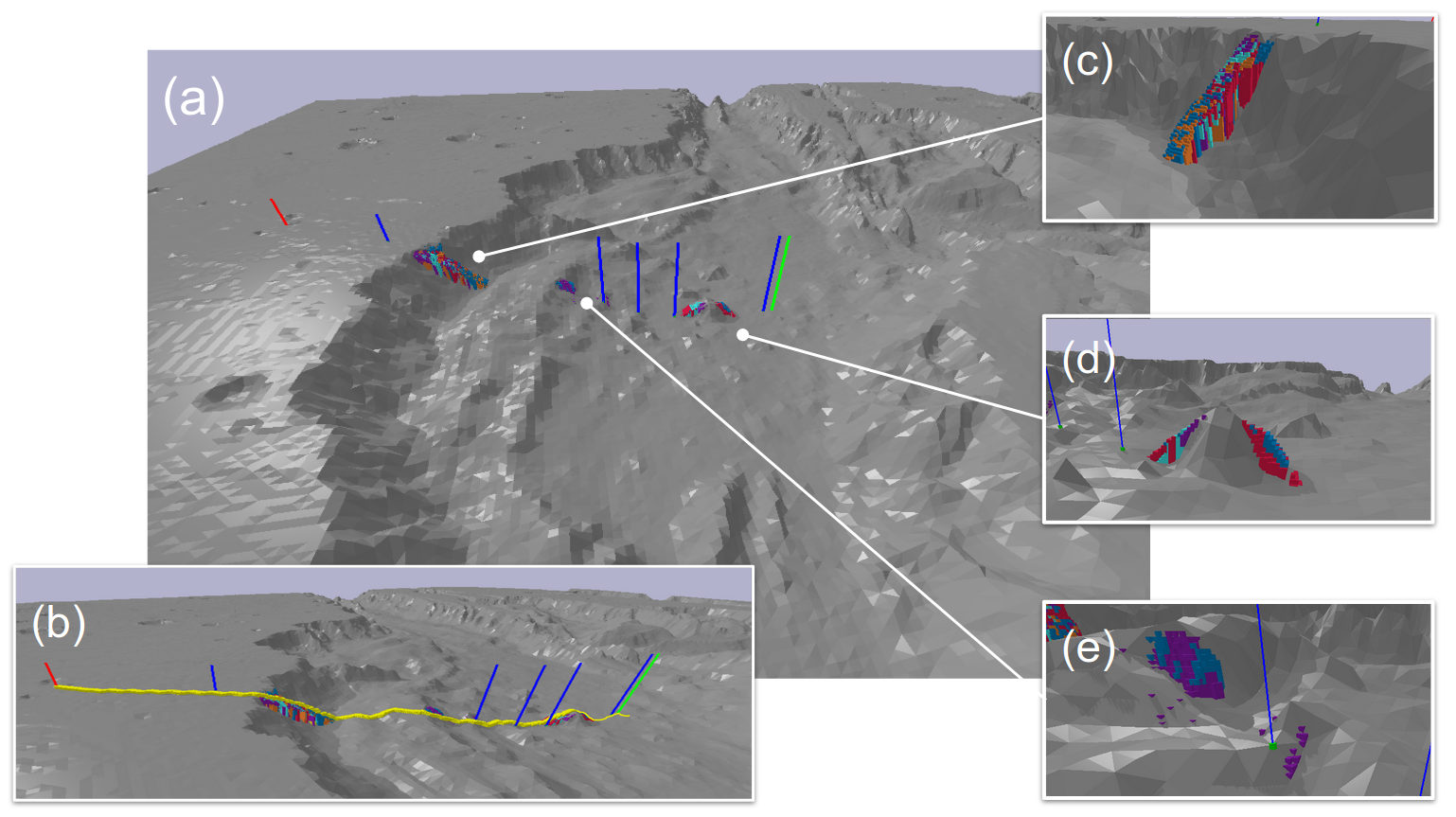
A team of agile builder robots capable of depositing material in their environment are deployed
to build a navigable path to the target location for the mobile payload.
In the image shown here, each builder robot deposits material of a different color and the path
is highlighted in yellow.
The robots were deployed on a topographic model of a portion of Valles Marineris on the planet
Mars. We ran the tests for robot teams of different sizes and measured the number of simulation
time
steps required to reach the target location.
Scenario B: Terrain levelling
A team of robots is tasked to level an uneven terrain as part of a site preparation project.
Robots with small localization error
The robots finish the task without overlapping each others' depositions.
Robots with large localization error
The robots cross over each others' deposition paths. They maintain progress but may not complete the task.
Nonetheless, MARSala allows each robot to build in reaction to their local environment. Hence, they are inherently coordinated by the environment state, maintaining progress but may not guaranteeing completion.
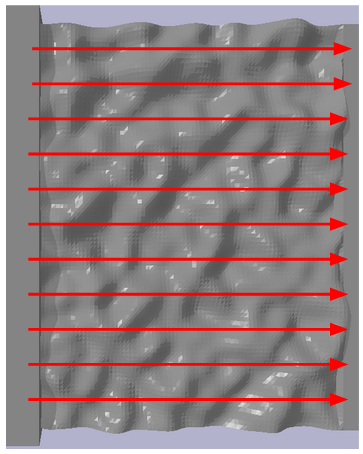
The goal vector map represents the target location of a robot based on its location. The pointed end of a red arrow represents the target location for a robot located at its rear end. The goal synthesizer compiles goals based on the robot’s location and instructs them to use a small slope parameter. The robots were deployed at the larger flat area on one end of the terrain and the simulation was run with 11 robots to cover the entire area