Robot Design
The robots are low-cost mobile manipulators made from off-the-shelf components, capable of maneuvering over irregular terrain.
[Scroll down for Version 4]

Version 1
RUFOUS

Version 2
CASTOR
Finalist | Best Systems Paper, RSS 2018

Version 3
PUFFER
Compute Module
Nvidia Tegra TK1
Quad-core 2.3GHz ARM Cortex-A15
Size: 127mm x 127mm x 25mm
DRAM: 2GB DDR3L 933MHz
Storage: 16GB fast eMMC
Power: 3 Watts
Intel Aero Board
Quad core 2.4 GHz Intel Atom x7-Z8700
Size: 88mm x 63mm x 20mm
DRAM: 2GB DDR3L 933MHz
Power: 2GB DDR3L 933MHz
Intel Up Board
Quad core 1.92 GHz Intel Atom x7-Z8350
Size: 85 mm × 56 mm x 20mm
DRAM: 4GB DDR3L 933Mhz
Storage: 32GB eMMC
Manipulator
uArm Metal
4 DOF / RC Servo Motors
Weight: 1.5 kg
Repeatability: 10mm
Max Lifting Weight : 500g
Work Range: 120 - 320 mm
uArm Swift Pro
4 DOF / Stepper Motors
Weight: 1.9 kg
Repeatability: 0.2mm
Max Lifting Weight : 500g
Work Range: 50mm - 320mm
uArm Swift Pro
4 DOF / Stepper Motors
Weight: 1.9 kg
Repeatability: 0.2mm
Max Lifting Weight : 500g
Work Range: 50mm - 320mm
Base Module
Wild Thumper 4WD Aluminium chassis
Spiked 120mm-diameter wheels
Individual Twist Suspensions
60mm Ground clearance
3D Printed Motor Housings v1
Brushed DC motor with Encoders × 4
Closed loop velocity control mode
Weight: ~ 2.8kg
Wild Thumper 4WD Aluminium chassis
Spiked 120mm-diameter wheels
Individual Twist Suspensions
50mm Ground clearance
3D Printed Motor Housings v1
Brushed DC motor with Encoders × 4
Closed loop velocity control mode
Weight: ~ 3.5kg
Customized Wild Thumper 4WD Aluminium chassis
Spiked 120mm-diameter wheels
Individual Twist Suspensions
60mm Ground clearance
3D Printed Motor Housings v2
Brushed DC motor with Encoders × 4
Closed loop velocity control mode
Weight: ~ 3.4kg
Power and Battery
7.4 DC LIPO Battery
DC-to-DC and Logic Level converters
Onboard Voltages: 5V/12V
Dual 7.4 DC LIPO Batteries
DC-to-DC and Logic Level converters
Onboard Voltages: 5V/12V
Power Monitoring Circuit
Automatic Shutdown and Restart between battery replacements
Dual 7.4 DC LIPO Batteries
DC-to-DC and Logic Level converters
Onboard Voltages: 5V/7V/12V
Power Monitoring Circuit
Sensors
Wheel Encoders 9600 counts/revolution
April Tag for Localization
Overhead Kinect v2 Camera
Wheel Encoders 9600 counts/revolution
April Tag for Localization
Power Monitoring Circuits
IMU
Realsense D415 Depth Camera
OpenMV Camera
Overhead Kinect v2 Camera
Wheel Encoders 9600 counts/revolution
April Tag for Localization
Power Monitoring Circuits
IMU
Realsense D415 Depth Camera
VGA Camera
Overhead Kinect v2 Camera
End Effectors
The robots are equipped with different end-effectors and camera modules based on their functionality. A gripper to handle compliant bags, a suction cup to handle foam blocks and a custom 1DOF gripper to handle previously unseen stones.
Bag Handler
The arm is modified to use a 1DOF generic gripper to pick up and deposit complaint bags. The overhead Kinect camera provides the location of the bags to the robot system. A pickup and deposit pose is calculated according to the robot design, environment and construction algorithm.

Detach Manuever
Castor detaches its arm's servo motors when the gripper is close to the bag allowing the open gripper to fall over. When the gripper is closed, the deactivated arm joints provide compliance for a better grip. The arm motors are then re-attached to lift the bag up.
Foam Handler
The arm is modified to use a 1DOF generic gripper to pick up and deposit complaint bags. The overhead Kinect camera provides the location and size of the foams to the robot system. A pickup and deposit pose is calculated according to the robot design, environment and construction algorithm.
Visual Servoing
Puffer uses a OpenMV M7 Camera, fixed on the end-effector of the arm, to align its suction cup to the AprilTag on a foam block. A contact switch on the end-effector assists the pickup planning. After pickup, the suction cup is rotated to align the block's minor axis with the robot axis.
Stone Handler
A 1DOF compliant gripper was designed to pickup previously unseen stones. The stones were chosen such that are within the payload requirements.
Design Limitations
The
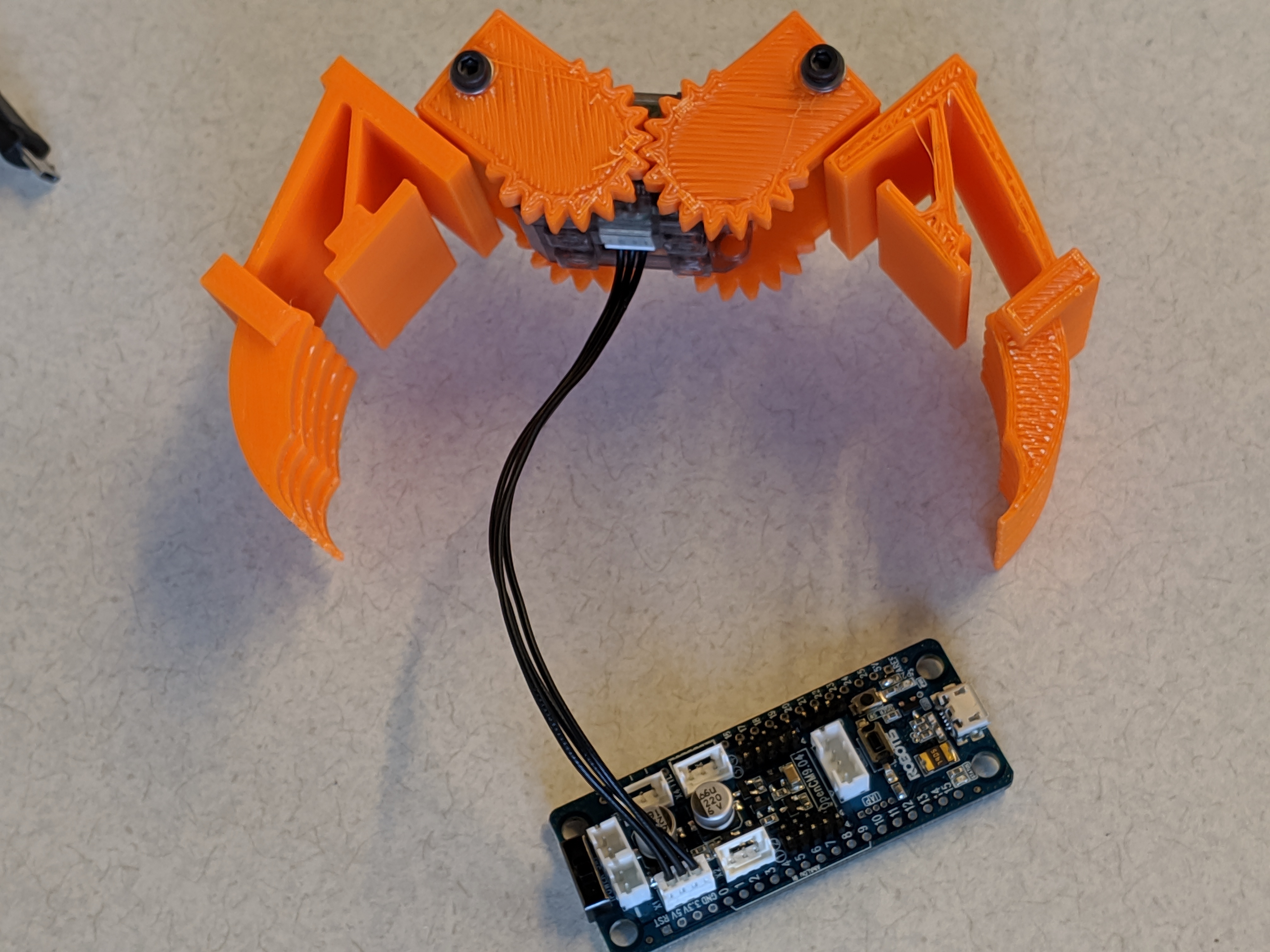
Stone Crabber
is designed in accordance to the power, the arm's payload and the motor's thermal limitations. A XL320 Servo Motor with a torque of 0.39N-m weighs 16.7 g, the VGA camera module weighs at 25 g and the gripper weighs around 40g. The effective payload is now reduced to 210 g, but is large enough to pick up assorted small-to-medium sized river pebble rocks. The motor controller provides an approx. current-based torque feedback that allows for the gripper to effectively grip a stone without overheating during long run times.
Gripper Prototype
Using styrofoam on the gripper fingers increases friction and allows for a much better grip.
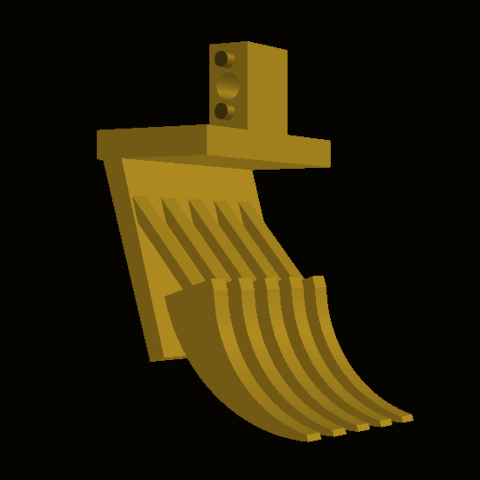
The fingers are
curved
while being
flat and thin
near the pick-up points to scoop the object.

Five parallel sub-fingers
are connected to the main rigid finger body through a flexure.

The
flexure joint
enhances compliance and increase friction after the initial grasping.
Stone Crabber
is a 1 DOF Pinch gripper designed to pick up stones.
A downward-facing VGA
gripper camera
is fixed on the end-effector of the arm.

The object pose with the
best "score"
is chosen as the deposition pose.
Version 4: Robot Design Concept
[Work in Progress]

A newer, modular and self contained robot system that can temporarily store stones for future construction tasks. The picture depicts a robot design concept.
A compliant gripper allows the robot to pick up previously unknown, found stones from a pile.

The compliant gripper fingers taper towards their tips to provide enough pinching force to also pickup small regolith bags. Picking up individual bags from a pile is an involved task. However, multiple bags picked up from a pile may be separated using environmental features. The video demonstrates this idea.
System Design
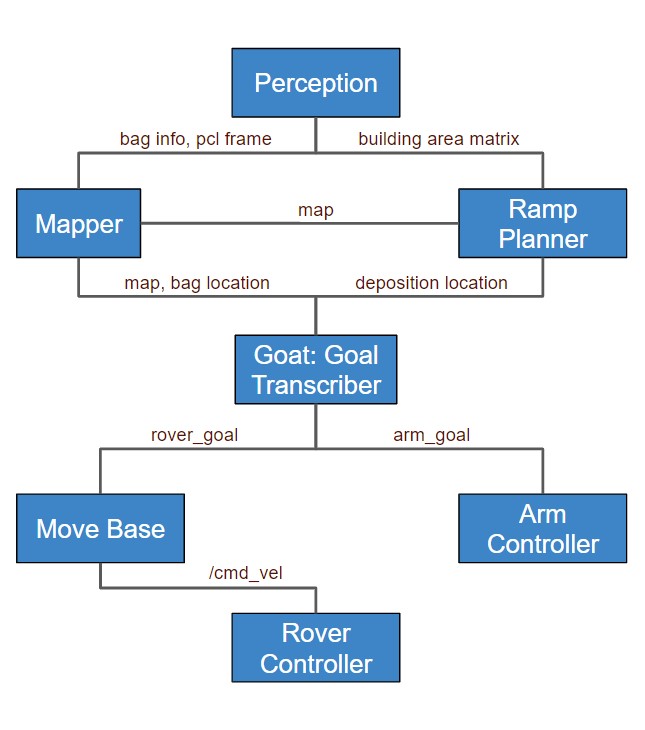
Node Architecture
The robot system is designed atop the ROS architecture. It allows us to use open source packages like the move_base navigation package and the AprilTag fiducial detection algorithm, while promoting modularity in our code base as well. The node architecture depicts the minimal set of nodes used in all the projects developed thus far.
