Vivek Thangavelu
PhD Student, Cornell University
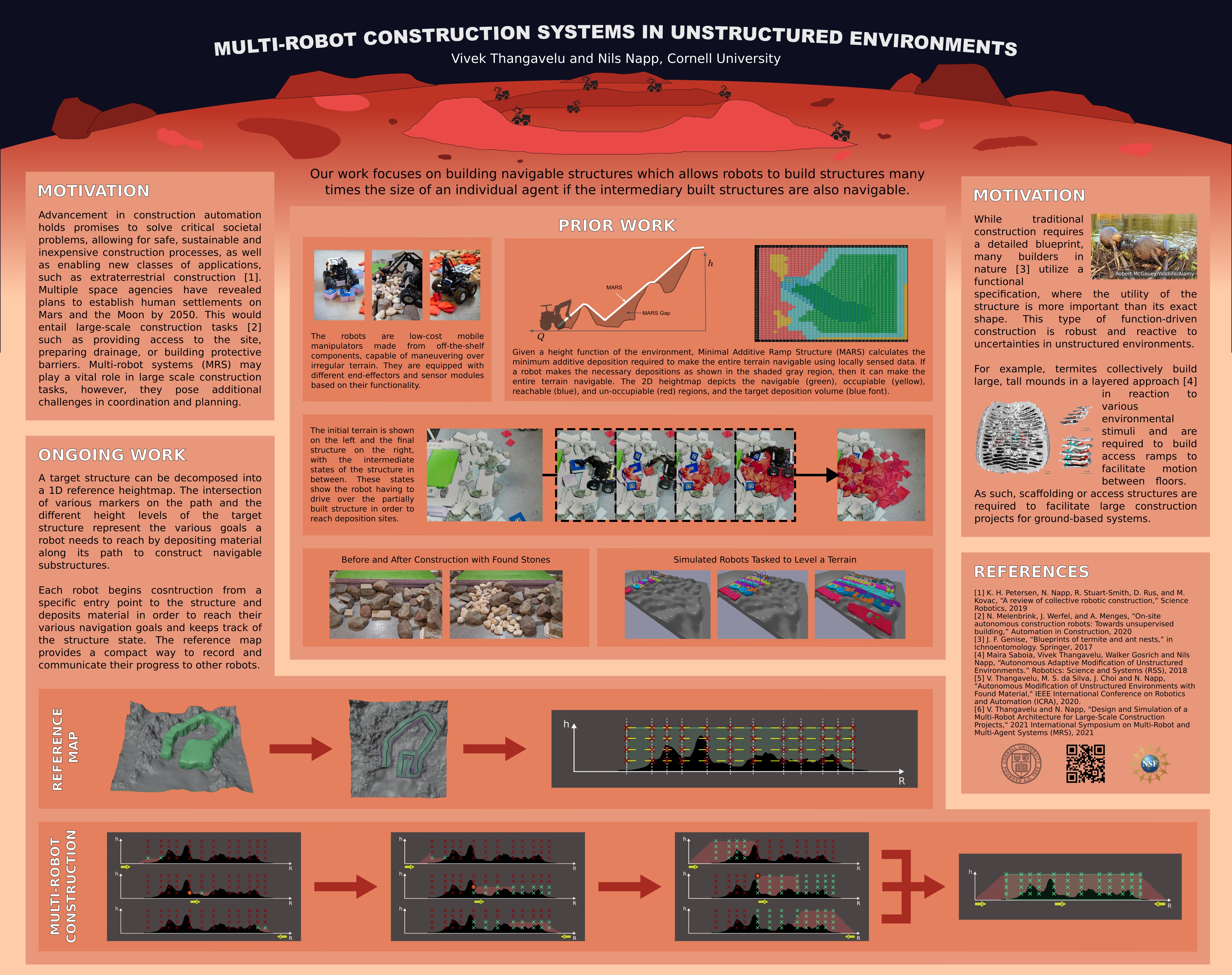
My work focusses on designing decentralized algorithms for multi-robot systems that
build large-scale structures in remote and unstructured environments,
while guaranteeing certain notions of progress and completion of the cooperative task.
In a nutshell, ground-based mobile agents are tasked to build traversable
structures using a mixture of different types of building materials (rigid, compliant and found
stones) which allows them to build structures
many times the size of an individual agent.
I have experience working with both simulation and real-world
robot systems. Currently I am designing the 4th version of
our robot,
which is a custom-made self-contained mobile manipulator system capable of maneuvering over
irregular terrain.
A heterogenous multi-robot system will be tasked to build a large target structure (~8 times the
size of a robot) using a variety of building materials (found stones, rubble and regolith bags).
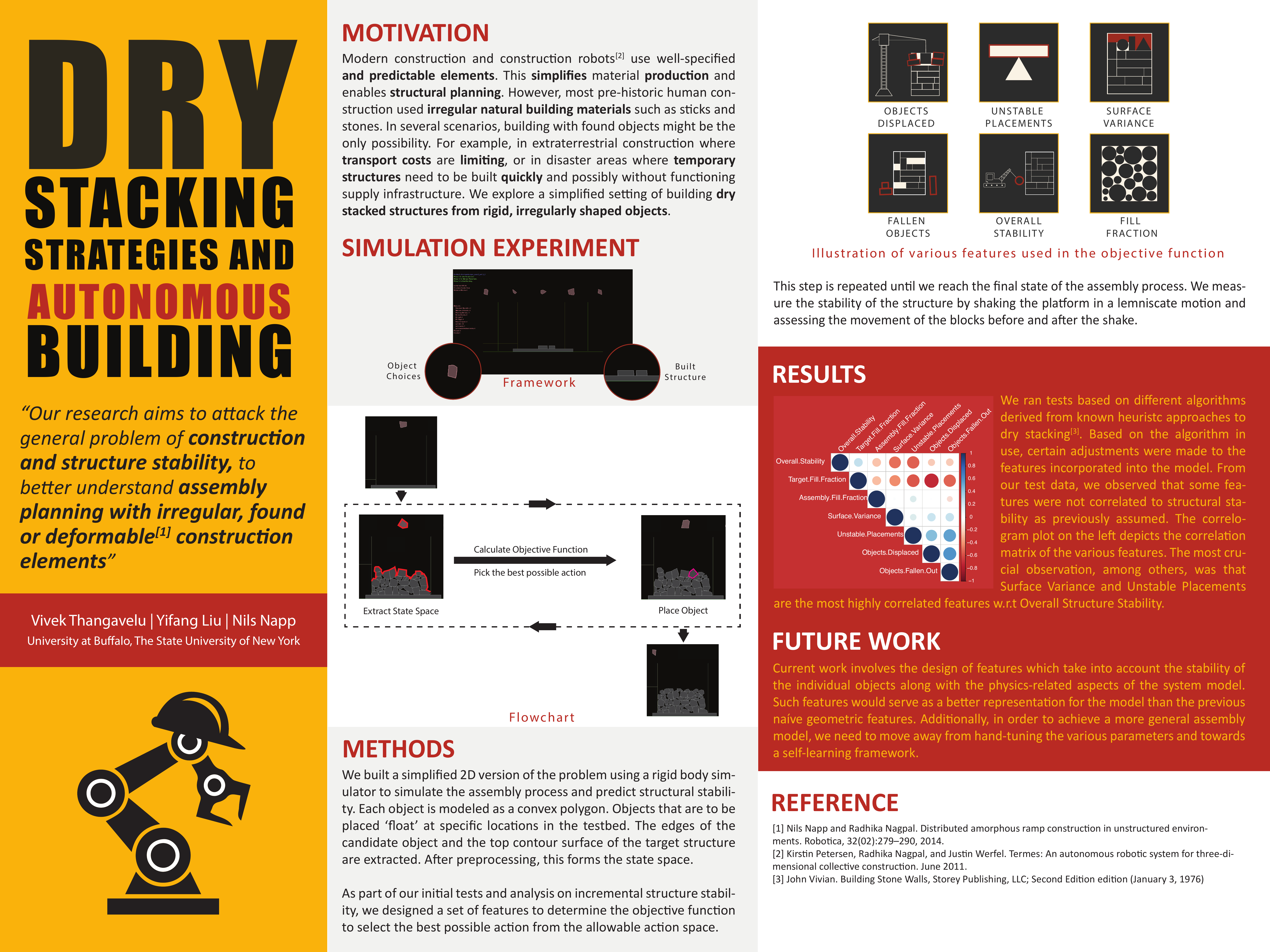
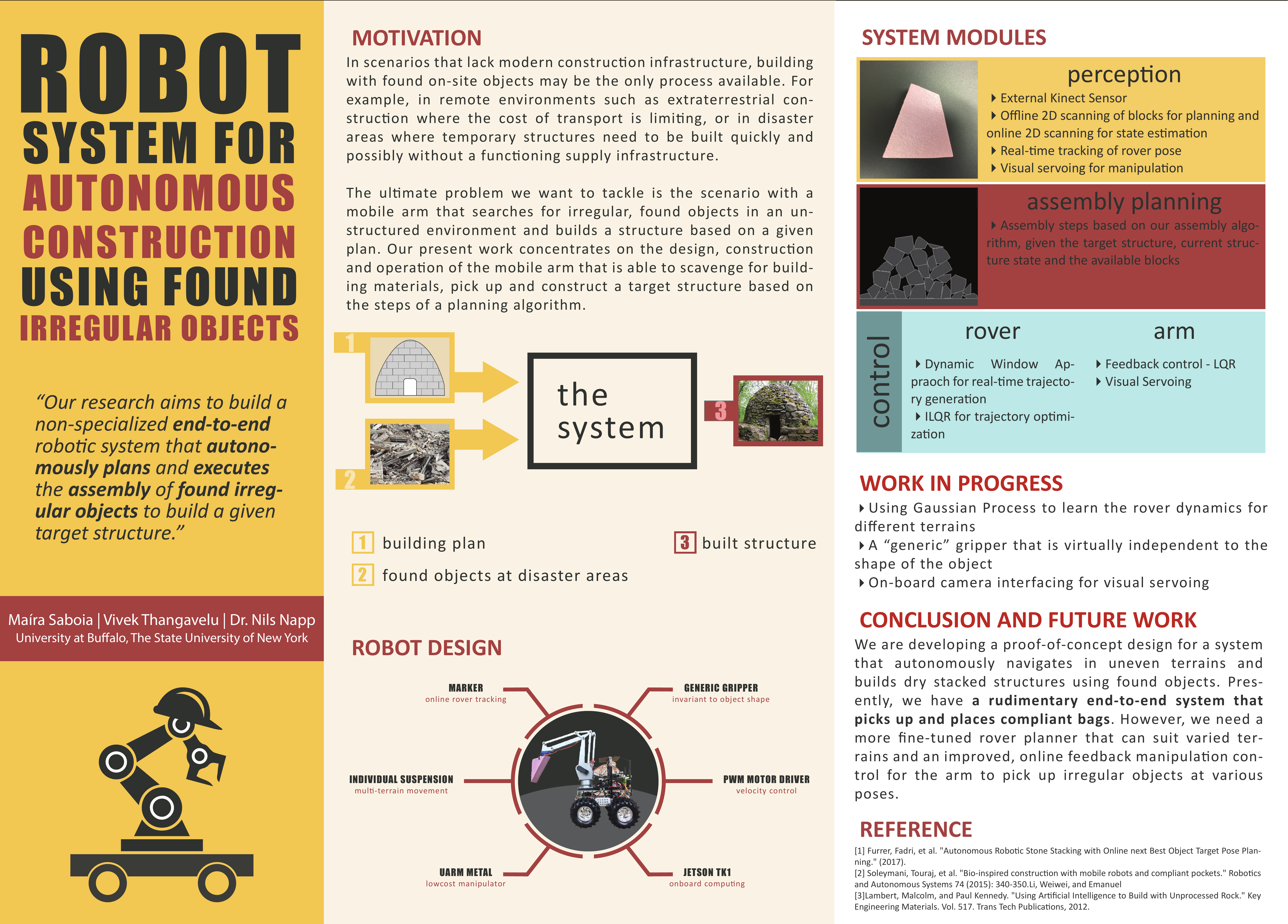
My work is loosely categorized as below; please click on the icons for more information.

Robot constructing a navigable structure with bags
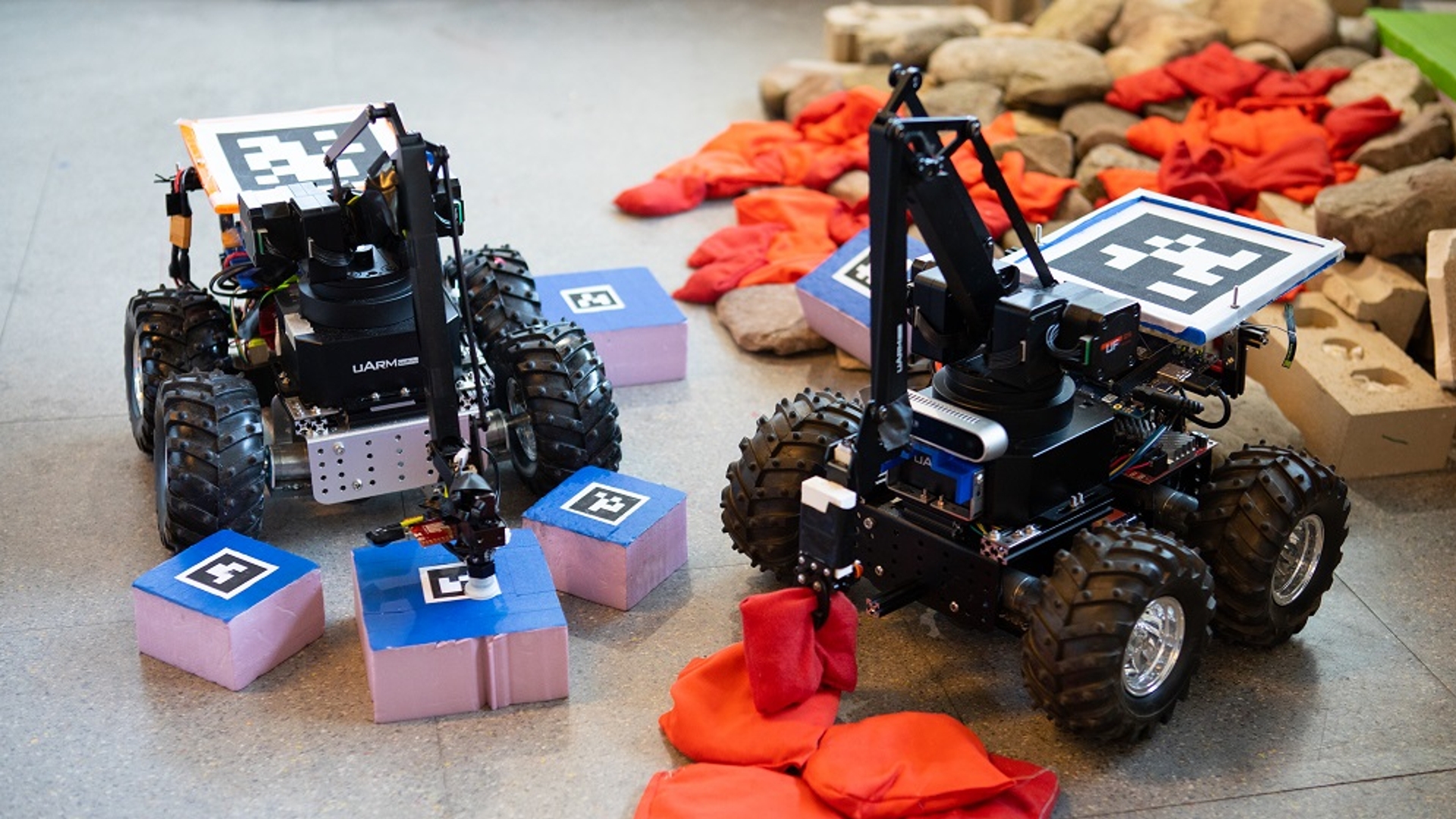
Heterogeneous robot team constructing with bags and foam blocks

Robot constructing a navigable structure with found stones

Concept design: Robot with material storage (WIP)
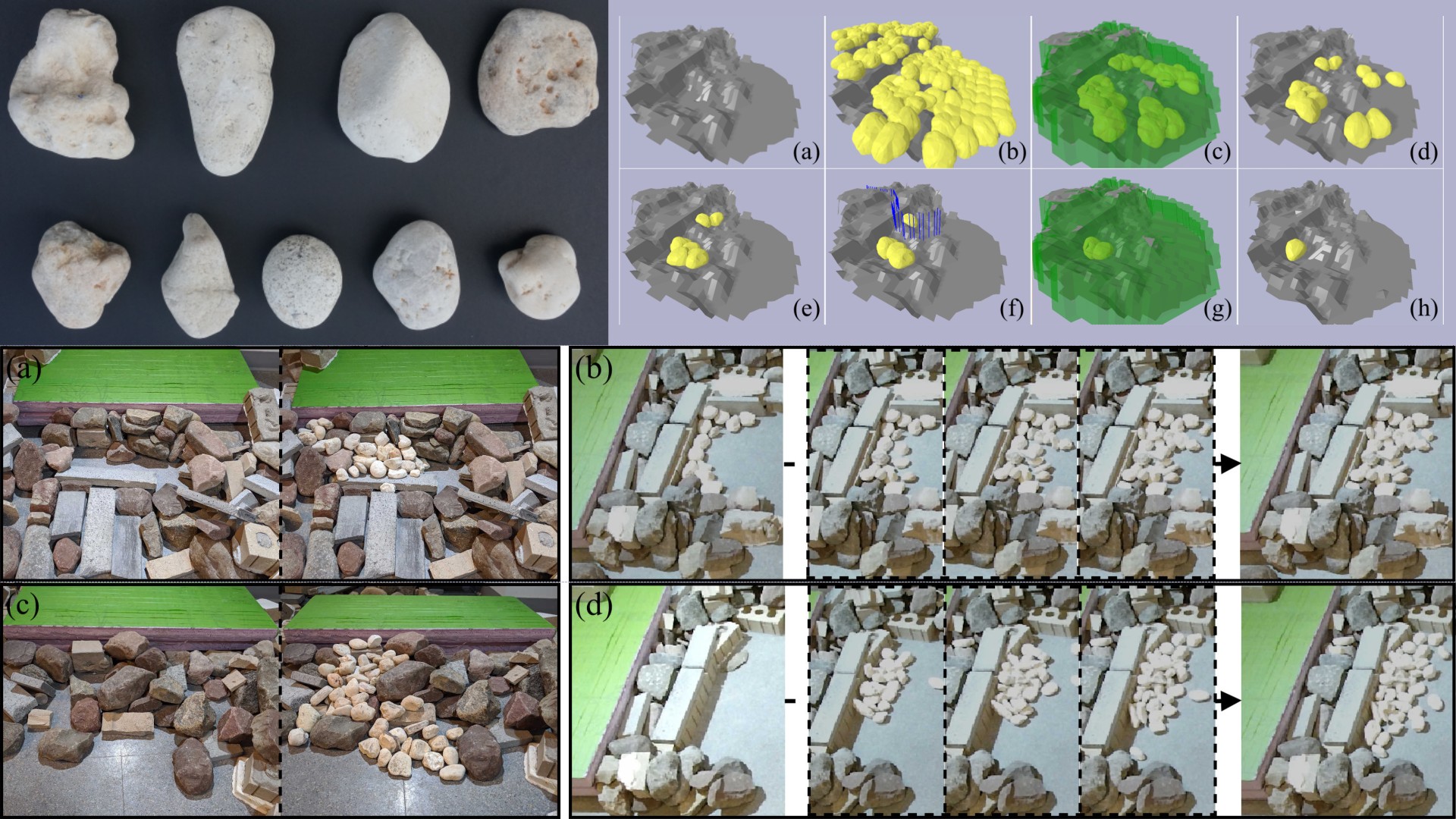
Stone dataset for construction, Deposition planning, and Experiments depicting the progression of the construction process